- 4E, No.3 Shenfeng Road, Liuyao Community, Henggang Street, Longgang District, Shenzhen,China
- cc.shen@xypltd.com
- Call: +86 15112667855
News
When and how to use a multi turn encoder
- 2026-06-10
A multi turn rotary encoder is a precision electromechanical sensor that can not only measure the angular position of a shaft within a single turn (0 ° to 360 °), but also measure the cumulative number of complete rotations. A single turn encoder resets its output with each revolution, while a multi turn encoder is different as it can provide both absolute angular position and total number of rotations, enabling precise position feedback over a larger range of motion.
In advanced motion control applications, capturing only one 360 ° axis angle is not sufficient to achieve reliable system monitoring. When rotational motion is mechanically coupled with linear displacement, gear systems, or large equipment, tracking the total number of revolutions becomes crucial. Multi loop encoders can provide continuous absolute position data, ensuring precise synchronization and control of complex electromechanical systems, thus meeting this requirement. This article will discuss in more detail the multi turn encoder, including its working principle, usage scenarios, and other integration considerations.
The functions and advantages of multi turn encoders
By monitoring when the single coil encoder flips from 359 ° to 0 °, the software tracks the rotation of the entire axis. This method may seem feasible, but it poses serious reliability challenges. Sampling omissions, power outages, communication failures, and even noise caused by vibrations can all lead to asynchronous rotational speeds. Fast reversals near the 0 °/360 ° boundary often further confuse the flip detection logic, resulting in cumulative errors. Even with extensive filtering and algorithm adjustments, software based solutions are still susceptible to accuracy loss.
The multi turn absolute encoder solves these challenges at the hardware level by integrating two key functions: single turn fine angle resolution and a built-in tachometer for tracking the complete shaft rotation speed. Angle measurement usually uses capacitive, magnetic, or optical sensing technology, while the tachometer updates the angle data synchronously. This combination provides true absolute multi turn positions without relying on external flipping logic to provide robust and error free feedback.
The tachometer itself can be implemented in various ways. Mechanical encoders use gear based systems, magnetic designs typically use Wiegand pulse energy to record revolutions, while digital implementations rely on continuous electricity. The latter usually requires careful system design to maintain the continuity of the power supply (usually through backup batteries or software safeguards) in order to keep a record of the number of revolutions during power outages.
How to handle multi turn encoders at startup
A major challenge in the design of multi turn encoders is managing power on reset, as losing stored turns may affect absolute position data. People usually adopt various engineering strategies to alleviate this problem:
Origin or limit switch reference - When activated, the system will drive the mechanism to a predefined reference point and reinitialize the position of the encoder.
Save Last Known Value - If there is a host controller or non-volatile memory, the system can save the last recorded angle and revolutions before shutting down. After restarting, as long as the shaft does not move during the shutdown period, these values will be reapplied.
Mechanical shaft locking - During planned shutdowns or ultra-low power states, the shaft can be physically locked to prevent rotation. Then, the stored encoder values will take effect upon power up, achieving seamless recovery. This method is particularly suitable for portable or battery powered systems.
System layer reinitialization - For applications that can tolerate losing a few laps, the system only needs to be reset and recalibrated at startup using external sensors or secure default states. This reduces complexity, but only applies to non critical position feedback applications.
For applications that cannot accept losing revolutions in the event of a power outage, integrated backup batteries are one of the most reliable solutions. This method does not rely on external recalibration methods or auxiliary sensors, ensuring that the encoder can continue to be powered even after brief or prolonged power outages.
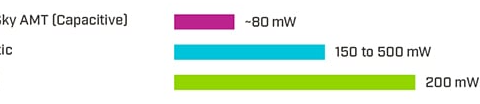
From the perspective of power consumption, this is precisely where technology selection becomes important. The operating power consumption of capacitive encoders (such as Same Sky's AMT series) is typically only~80 mW, making them highly efficient for embedded and battery powered designs. Its efficiency minimizes the consumption of backup energy storage to the greatest extent possible, and long-term support can be achieved without excessive battery capacity.
By contrast, the power consumption of magnetic encoders typically ranges from 150 to 500 mW, while optical encoders typically require 200 mW to over 1 W in high-resolution or LED based systems. This efficiency advantage makes capacitive encoders highly attractive in power limited environments, where every milliwatt is crucial.