- 4E, No.3 Shenfeng Road, Liuyao Community, Henggang Street, Longgang District, Shenzhen,China
- cc.shen@xypltd.com
- Call: +86 15112667855
News
Supporting signal and power connectors for robots and other high-density industrial applications
- 2026-06-11
Smart factories are continuously improving their level of automation through decentralized intelligence and control, utilizing modular robot concepts. The physical distribution of control functions requires connections through wires and cables, and connectors must be reliable and safe enough to match the environmental requirements of modern factories. These connectors must have a sufficiently low impedance, a sufficiently large contact area to meet the rated current requirements, and adopt a powerful locking mechanism to resist vibration and impact. In addition, they must be easy to assemble and modify, and able to be updated and modified quickly.
This article first briefly introduces the connection requirements of industrial robots and factory automation, and then introduces the connector series of TE Connectivity AMP, demonstrating how to use the characteristics of these connectors to support the power, signal, reliability, and safety requirements of these applications.
What is a smart factory?
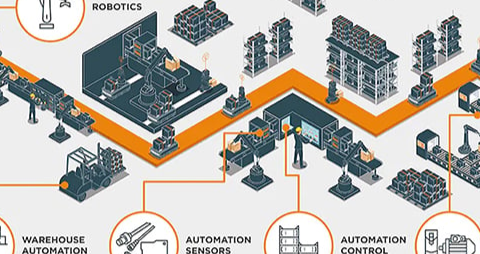
A smart factory is a comprehensive facility that utilizes digitally interconnected machines, robots, and local sensors for control, real-time data collection, analysis, and decision-making (Figure 1). This type of factory is becoming increasingly decentralized and modular, making it easy to reconfigure to meet constantly changing production demands. Modular organization facilitates local control and deployment of small machines to improve production flexibility.
Schematic diagram of networked machines, robots, and interconnected sensors (click to enlarge)
Figure 1: Smart factories use networked machines, robots, and interconnected sensors to ensure efficient operation. (Image source: TE Connectivity AMP)
These facilities use modular workstations equipped with independent or collaborative robots. There are various types of mobile robots, such as Automated Guided Vehicles (AGVs) or Autonomous Mobile Robots (AMRs), that move products between workstations. Compared to fixed robots, the advantages of AMR and AGV lie in their strong mobility, allowing them to rotate and move between workstations. Through the collaborative work of AGV, AMR, and collaborative robots, a production line can perform different tasks in different units. Robots can move or redistribute between workstations as needed to improve overall efficiency. These workstations are often located in harsh environments, so designers must consider that robots and other automated machines may be exposed to high temperatures, humidity, dust, corrosive chemicals, as well as impact and vibration.
Sensors monitor all operations. According to the design, sensors can be wired or wireless. Wireless sensors are typically connected through the Industrial Internet of Things (IIoT). Mobile robots can also be monitored using IIoT.
Like typical electronic systems, the industry trend is towards miniaturization of robots, machines, sensors, and controllers. Due to its small size and light weight, the demand for electricity is lower and the available space is larger, thereby improving productivity. In addition, the volume of printed circuit boards is also smaller, which requires components to have higher volumetric efficiency.
Flexible and reliable power and signal connectors
Whether it is wire to wire, wire to board, or wire to panel, connectors must reliably transmit power and control signals. The smaller the connector, the closer the spacing, and the finer the conductor spacing.
The purpose of modular design is to achieve flexibility; Therefore, connector solutions must have the same adaptability as automation systems. In order to meet the need for flexibility, the design of connectors must ensure safe and convenient locking to prevent mismatches during assembly and accidental pull-out due to impact and vibration.
The Dynamic series connectors of TE Connectivity AMP are designed to meet the needs of high-density industrial signal and power circuits. These connectors meet these requirements through multiple connector series, capable of handling currents ranging from 2.6 to 100 amperes (A) and voltages ranging from 125 to 1000 volts. Depending on the rated current and voltage, these connectors can provide high-density interconnection with conductor spacing ranging from 1.8 millimeters to 24.5 millimeters (mm).
The most compact Dynamic connector is the Mini series. This series is suitable for wire to board applications, with a contact spacing of 1.8 mm and pin numbers of 12, 16, and 20. Acceptable wires of 22 to 26 AWG with a rated voltage of 250 volts AC (VAC) and a current of 3 A.
For example, 1-2834461-2 (Figure 2, top) is a 12 contact socket housing with contacts arranged in double rows, with a spacing of 2.75 mm between columns. The connector is 19.3 mm long, 15.7 mm wide, and 8.35 mm high.
Schematic diagram of TE Connectivity 12 pin Dynamic Mini wire to board socket and pin holder components
Figure 2: The components of the 12 pin Dynamic Mini wire to board socket (top) and needle holder (bottom) are shown. (Image source: TE Connectivity AMP)
The socket housing is equipped with TE Connectivity AMP 2834464-5 socket contacts. These are tin plated copper alloy crimped wire terminals that can accept 26 AWG wires. Its rated current is 3 A and its operating voltage is 250 VAC or 125 VDC. Each contact uses a locking plate to secure itself in the housing. In addition, the casing is equipped with an embedded secondary lock to provide additional safety protection for the locking mechanism of the contact terminals.
The socket is connected to 1-2834465-2, which is a 12 pin surface mount needle holder (Figure 2, bottom). The length of the needle holder is 19.3 mm, the width is 12.3 mm, and the height is only 8.7 mm. The needle holder includes square cross-section tin plated contact pins and adopts a fully covered structure.
This connector has a key control to prevent incorrect insertion and is equipped with a locking latch to provide sound and tactile feedback when the socket and needle socket are fully engaged. The latch is located in the recess below the top of the connector to prevent accidental unlocking. The side nail provides mechanical support for the needle hub.
The Mini series connectors have smaller dimensions and higher reliability, which can not only meet the requirements of industrial environments, but also other applications with higher anti vibration requirements such as robots and automobiles.